 …
…
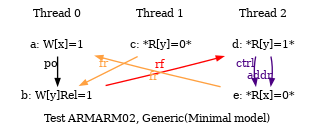
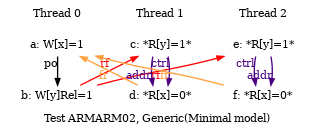
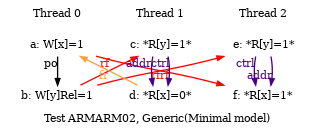
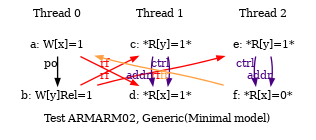
AArch64 ARMARM02
{
0:X1=x; 0:X3=y;
1:X1=y; 1:X4=x; 1:X3=-1;
2:X1=y; 2:X4=x; 2:X3=-1;
}
P0 | P1 | P2 ;
MOV W0,#1 | LDR W0,[X1] | LDR W0,[X1] ;
STR W0,[X1] | CMP W0,#1 | CMP W0,#1 ;
MOV W2,#1 | B.NE Exit1 | B.NE Exit2 ;
STLR W2,[X3] | EOR W2,W0,W0 | EOR W2,W0,W0 ;
| LDR W3,[X4,W2,SXTW] | LDR W3,[X4,W2,SXTW] ;
| Exit1: | Exit2: ;
~exists
(1:X0=1 /\ 1:X3=0 \/ 2:X0=1 /\ 2:X3=0)
(* ARM ARM, F.2.1, basically MP+popl+addr, with two readers *)